การทำงานในการพัฒนาระบบ Machine base condition CBM
Posted 19 Aug 2020 10:25 | 3,949 views
การทำ condition base maintenance เป็นแนวทางในการซ่อมบำรุง โดยทำการซ่อมบำรุงตามสภาพจาก condition monitoring ซึ่งช่วยให้ขยายระยะเวลาออกไปได้ ลด work road ,maintenance cost ลดลง เพิ่ม availability ปรับปรุงการวางแผนและช่วยในการจัดการ spare part ที่ดีขึ้น
(Part II)
3.1 การวิเคราะห์สถานะของเครื่องจักรและอุปกรณ์ระบบนี้จะแบ่งออกเป็น 3 ประเภท
- การวิเคราะห์การสั่นสะเทือน (Vibration Analysis)
- การวิเคราะห์สนามแม่เหล็ก (Magnetic field Analysis)
- การวิเคราะห์อุนหภูมิ (Temperature Analysis)
ขั้นตอนในการแสดงผลจะมีเงื่อนไขในการเตือนเป็น 2 รูปแบบคือ
1) เมื่อได้ค่าพารามิเตอร์จากการตรวจวัดแล้วนำมาเข้าplatform เป็นแผนภูมิเปรียบเทียบกับค่ามาตรฐาน ดังตัวอย่างตามรูปที่ 4 เพื่อให้ทราบสถานะของความต้องการกำหนดการบำรุงรักษา
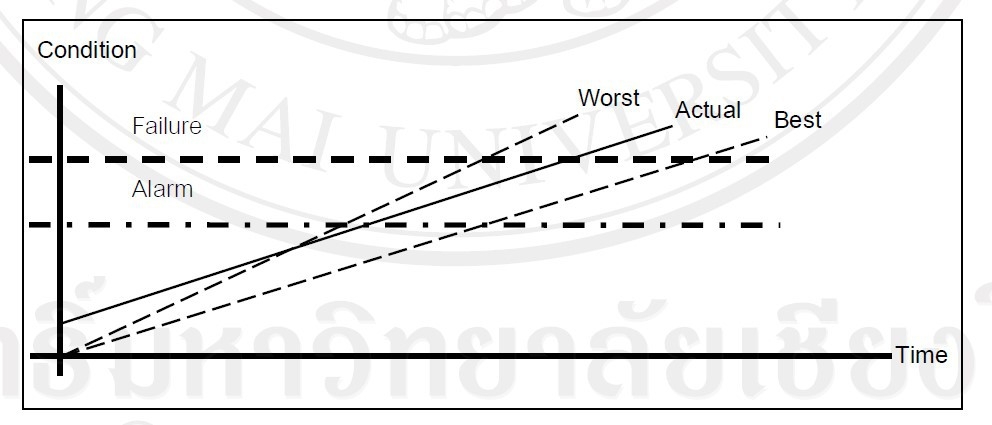
Picture 4 : กระบวนการนำพารามิเตอร์จากการตรวจวัดแล้วมาทำป็นแผนภูมิเปรียบเทียบกับค่ามาตรฐาน
2) กระบวนการนำพารามิเตอร์หาแนวโน้มของความเสียหายเพื่อวางแผนบำรุงรักษา Trend Monitoring เป็นการเฝ้าติดตาม พฤติกรรมการทำงานของเครื่องจักรอุปกรณ์ เพื่อหาพารามิเตอร์ (Parameter) ที่เป็นตัวบ่งชี้สภาพ ความรุนแรงของปัญหาที่ปรากฏออกมานำมากำหนดเป็นระดับการเตือนภัย (Alarm Level) เพื่อทำการบำรุงรักษาก่อนที่จะเกิดความเสียหายดังตามรูปที่ 5 (ชัยอาจ, 2555)
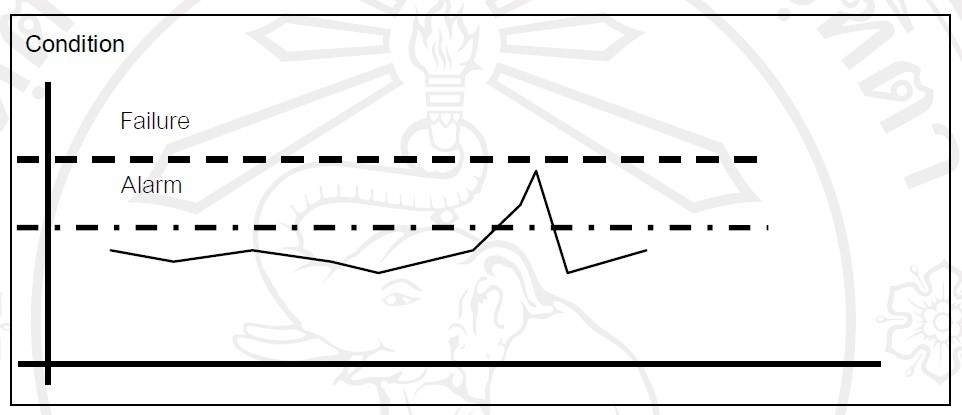
Picture 5 : กระบวนการนำพารามิเตอร์หาแนวโน้มของความเสียหายเพื่อวางแผนบำรุงรักษา
3.2 กระบวนการในการออกแบบและแนวทางการประยุกต์ใช้สำหรับ CBM
3.2.1 การออกแบบและการนำไปประยุกต์ใช้พิจารณาจากภาพด้านล่างมีทั้งหมด 7-layer ซึ่งการพัฒนา Feature CBM จะดำเนินการพัฒนาทั้ง 4-Layer (Layer 3-6)
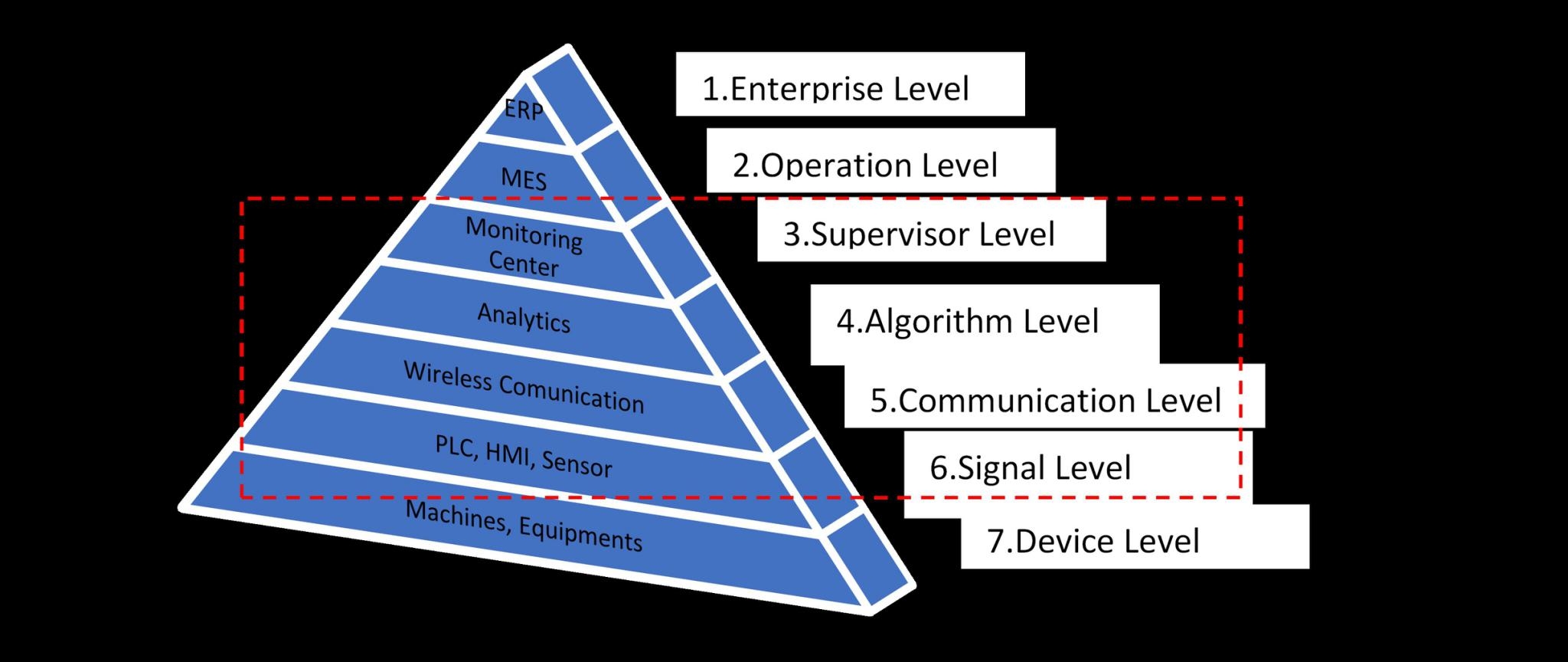
Picture 6: พิระมิดแสดงลำดับขั้นของ System
3.2.2 รายละเอียดในการพัฒนา ทั้ง 4 layer
1. Monitoring Center จะใช้เทคโนโลยี Web application เว็บแอปพลิเคชั่น หรือที่รู้จักกันในชื่อสั้น ๆ ว่า “เว็บแอป (Web App)" เป็นโปรแกรมคอมพิวเตอร์หนึ่งที่ทำหน้าที่เฉพาะ โดยใช้เว็บเบราว์เซอร์เป็นไคลเอนต์ (Client) ซึ่งไคลเอนต์นี้เป็นระบบหรือแอปพลิเคชั่น ที่สามารถเชื่อมต่อเข้ากับระบบคอมพิวเตอร์อื่นที่เรียกว่าเซิร์ฟเวอร์ได้ แอปพลิเคชั่นเป็นเหมือนกับกระดานข้อความหรือแบบฟอร์มการติดต่อบนเว็บไซต์ และโปรแกรมประมวลผลคำ เป็นต้นในปัจจุบันจึงมีการพัฒนาเว็บแอปพลิเคชั่นควบคู่ไปกับการพัฒนาโปรแกรม เพื่อสอดคล้องต่อการใช้งานในปัจจุบัน นอกจากนี้เว็บแอปพลิเคชั่นยังช่วยลดความรับผิดชอบของนักพัฒนาในการสร้างไคลเอนต์ สำหรับคอมพิวเตอร์ประเภทใดประเภทหนึ่ง หรือระบบปฏิบัติการ เพื่อให้ทุกคนสามารถใช้แอปพลิเคชั่นพร้อมเข้าถึงอินเทอร์เน็ตได้ เว็บเเอปพลิเคชั่นมักใช้สคริปต์ทำงานบนฝั่งเซิร์ฟเวอร์ เช่น ASP, PHP เป็นต้น และสคริปต์ฝั่งไคลเอ็นต์ เช่น HTML, JavaScript เป็นต้น เพื่อพัฒนาแอปพลิเคชั่น ซึ่งทั้ง 2 ฝั่งจะทำหน้าที่แตกต่างกัน อย่างสคริปต์ฝั่งไคลเอ็นต์จะทำหน้าที่จัดการกับการนำเสนอข้อมูล ในขณะที่สคริปต์ฝั่งเซิร์ฟเวอร์จะจัดการกับพวกการจัดเก็บข้อมูล (Advanced Research Group Co., 2019)
2. Analytic การวิเคราะห์
1) การใช้แผนภูมิเปรียบเทียบกับค่ามาตรฐาน
2) การนำข้อมูลของผู้ผลิตเครื่องจักรมาเป็นเกณท์
3) การ ทำ Dashboard มี Graph หรือ Chart ที่ช่วยนำเสนอข้อมูล/สถิติที่ซับซ้อนให้ดูเข้าใจง่ายและมีประสิทธิภาพยิ่ง
ขึ้นผ่าน JavaScript Libraries (codequs, 2018)
4) การเฝ้าติดตามพฤติกรรมการทำงานของเครื่องจักรอุปกรณ์ เพื่อหาพารามิเตอร์ (Parameter) ที่เป็นตัวบ่งชี้สภาพ
ความรุนแรงของปัญหาที่ปรากฏออกมานำมากำหนดเป็นระดับการเตือนภัย(Machine Learning) *
3. Wireless Communication เลือกใช้ Technology LoRA Class B, LPWAN ( Low-Power Wide-Area Network ) เป็นเทคโนโลยีที่ถือว่าเป็นหัวใจสำคัญสำหรับงานทางด้าน Internet of Things LoRa เป็นเทคโนโลยีสัญญาณการสื่อสารอยู่โดยใช้เทคนิค Proprietary Spread Spectrum technology ซึ่งรูปแบบถูกพัฒนาโดย Semtech Corporation ตัวอย่างค่า Data Rate ( DR ) สังเกตจากรูป จะเห็นว่า DR เป็น 0 อุปกรณ์จะสามารถส่งข้อมูลได้ไกลที่สุด โดยสามารถส่งด้วย Bitrate ที่ต่ำที่สุดโดยการกำหนด Data Rate จะถูกกำหนดจาก Spreading Factor
( SF ) ตั้งแต่ 7– 12 โดยที่แบนวิดท์ ช่องสัญญาณ และค่า SF ที่ปรับได้อาจจะเปลี่ยนแปลงตาม Frequency plan ของแต่ละโซน (arjchariyaphat, 2018)
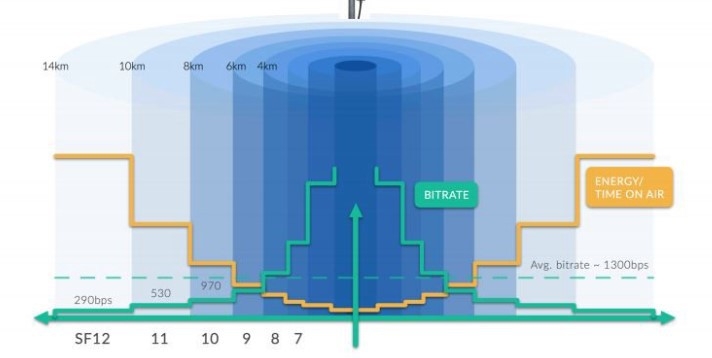
Picture 7: แสดงระยะทางเทียบกับ Bitrate
ถ้าดูจากรูป 7 ด้านบนเพิ่มเติมจะเห็นว่าเมื่ออุปกรณ์เข้าใกล้ gateway มากก็จะสามารถที่จะส่งข้อมูลด้วย BITRATE ที่สูงขึ้นได้ และการส่งข้อมูลจะเร็วขึ้นอีกด้วย รวมถึงพลังงานที่ใช้ในการส่งถ้าเทียบต่อขนาดของแพกเกตก็จะน้อยกว่าอุปกรณ์ที่อยู่ไกล Gateway อีกด้วยซึ่งในระดับ LoRaWAN จะมีโหมด ADR ( Adaptive Data Rate ) ที่เซตในแพกเกตการส่งข้อมูลเพื่อให้การเชื่อมต่อระหว่าง Gateway และ Device สามารถปรับ Spreading Factor แบบอัตโนมัติเพื่อประสิทธิภาพในการส่งโดยดูจากระยะการเชื่อมต่อระหว่าง Gateway และ Device โดยสามารถเลือกได้ว่าต้องการที่จะปรับเพื่อส่งข้อมูลได้เร็วที่สุด หรือ ปรับเพื่ออายุการใช้งานแบตเตอรี่ที่ยาวนานที่สุดเป็นต้น LoRaWAN แบ่งส่วนประกอบในการเชื่อมต่อออกเป็น 4 ส่วนได้แก่
ส่วนที่ 1
End-Device End-Device เชื่อมต่อกับ Gateway การเชื่อมต่อระหว่าง End-Device จะเชื่อมต่อเข้าไปที่ Gateway ได้เท่านั้น โดยที่ End-Device หนึ่งตัวสามารถส่งข้อมูลเข้าไปที่ Gateway ได้มากกว่า 1 การเชื่อมต่อระหว่าง End-Device กับ Gateway จะทำผ่าน LoRa แต่หลังจาก Gateway เป็นต้นไปจะเป็นระบบการเชื่อมต่อแบบ IP Baseก่อนที่ End-Device จะเชื่อมต่อกับ LoRaWan Network จำเป็นจะต้องผ่านกระบวนการ Activated จาก Network ได้โดยข้อมูลดังต่อไปนี้ End-Device จำเป็นจะต้องใช้ได้แก่Device Address ( DevAddr )Network Session Key ( NwkSKey )Application Session Key ( AppSkey ) End-Device Class ฝั่ง Devices จะมีการแบ่ง Class ออกไปสามคลาสตามลักษณะความต้องการในการเชื่อมต่อ Battery Powered — Class A ( ALL END-DEVICES ) จุดเด่นของ Class Aประหยัดพลังงานมากที่สุด ข้อด้อยของ Class A มี Latency ในการรับส่งที่นานที่สุด Class A จึงเหมาะกับ Application ประเภท Sensor ที่วัดค่าโดยใช้ แบตเตอรี่เป็นพลังงานหลัก

Picture 8 : Class A ( ALL END-DEVICES )
Low Latency — Class B สามารถใช้ได้ทั้ง Unicast และ Multicast Message การส่งข้อมูลจะมีการกำหนดรอบในการส่งจาก Periodic beacon จาก gateway ข้อดีคือสามารถกำหนดความเร็วและรอบในการส่งข้อมูลจากฝั่ง Server ได้จุดเด่นของ Class Bมี Latency ที่สามารถกำหนดได้ข้อด้อยของ Class Bใช้พลังงานสูงขึ้นถ้าเทียบกับ Class A Class B จึงเหมาะกับ Application ประเภท Sensor ที่วัดค่า รวมถึง Actuator ที่ต้องการสั่งค่ากลับจาก Server

Picture 9 : Low Latency — Class B
No Latency — Class C ป็นแบบที่ End-device แทบจะไม่มีการ sleep โดยจะเปิด RX slot เพื่อรอรับข้อมูลจาก gateway ตลอดเวลาทำให้การรับส่งข้อมูลแทบจะทันเวลา และ Server สามารถส่งข้อมูลไปที่ End-device ได้ตลอดเวลา แต่แลกกับการใช้พลังงานของ End-device ที่ค่อนข้างมากเมื่อเทียบกับแบบอื่นข้อเด่นของ Class C Latency ในการรับข้อมูลต่ำที่สุดEnd-device เปิดรับข้อมูลตลอดเวลาข้อด้อยของ Class C ใช้พลังงานสูงที่สุด จึงเหมาะกับอุปกรณ์ที่มีการเชื่อมต่อแหล่งจ่าย

Picture 10 : No Latency — Class C
ส่วนที่ 2
Gateway เชื่อมต่อกับ Network Server การเชื่อมต่อระหว่าง Gateway กับ Network Server จะกระทำผ่าน โพรโตคอล UDP ผ่าน network packet forwarder Protocol ของ Semtech
ส่วนที่ 3
Application Server ป็นหลายทางที่รับข้อมูลมาจาก End-device Application จะถอดข้อมูลที่ได้รับมาจาก End-device และประมวลผลสามารถมี Application Server ได้หลายชนิด ใน LoRaWan Network เดียวกัน
ส่วนที่ 4
การส่งข้อมูลจาก End-Device ถึง Application Server การส่งข้อมูลจาก Network Server จะผ่าน Gateway เพียงแค่ตัวเดียว โดยที่ Network Server เป็นคนเลือก Gateway ที่จะส่งข้อมูลกลับไปที่ End-Deviceการส่งข้อมูลจาก End-device ไปที่ Application Server จะแบ่งออกเป็นUnconfirmed-Data Message และ Confirmed-Data Message โดยจะต่างกันที่ Unconfirmed-Data Message จะไม่มีการส่ง Acknowledge กลับจาก Application Server มาที่ End-Device
4. Signal or sensor level เราพัฒนา Embedded เพื่อติดต่อกับเครื่องจักรหรือ Equipment’s ดังรูป 11 แสดงผล การติด Sensor เข้ากับ Motor เพื่อดูงานทำงานของ Bearing (Rastegari, 2017)
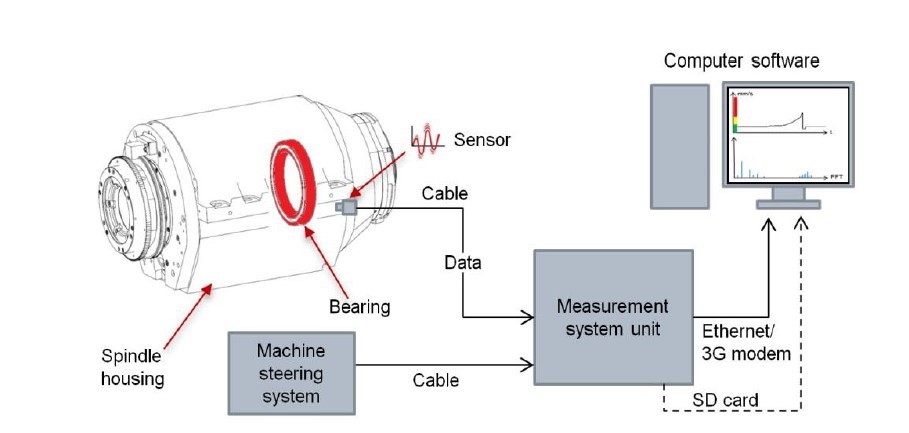
Picture 11 : การติด Sensor เข้ากับ Motor เพื่อดูงานทำงานของ Bearing
3.2.3 สำหรับการติดตั้ง Sensor กับ Node gateway จะใช้การดึงสายหรือ Wireless จาก Sensor เข้าตัว Node LoRa เพื่อลดภาระของ Bandwidth แล้วส่งผ่าน LoRa WAN เข้า Gateway LoRa
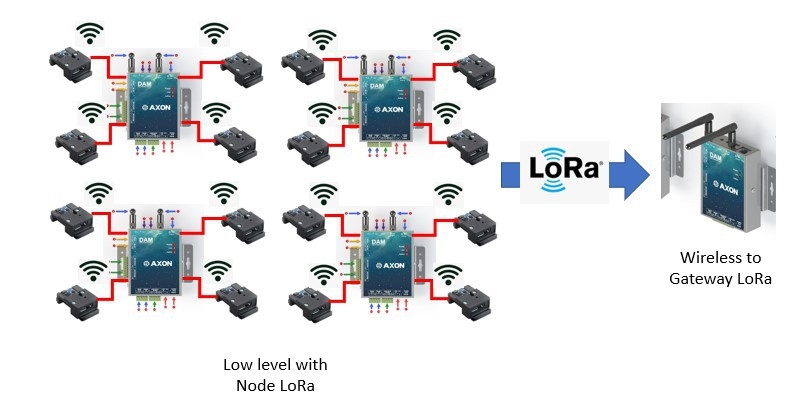
Picture 12 : Wireless architecture
3.2.4 Low level ใช้ sensor STEVAL-STLKT01V1 ชุดพัฒนาSTEVAL-STLKT01V1 ประกอบด้วยบอร์ดระบบหลักมีเซ็นเซอร์การเคลื่อนไหวความแม่นยำสูงและใช้พลังงานไฟฟ้าต่ำ มาพร้อมกับเฟิร์มแวร์ FP-SNS-ใช้โปรโตคอล BlueST-SDK ช่วยให้สามารถสตรีมข้อมูลได้ทันทีเพื่อลดเวลาการพัฒนารายละเอียดตามรูป (STMicroelectronics, 2019)
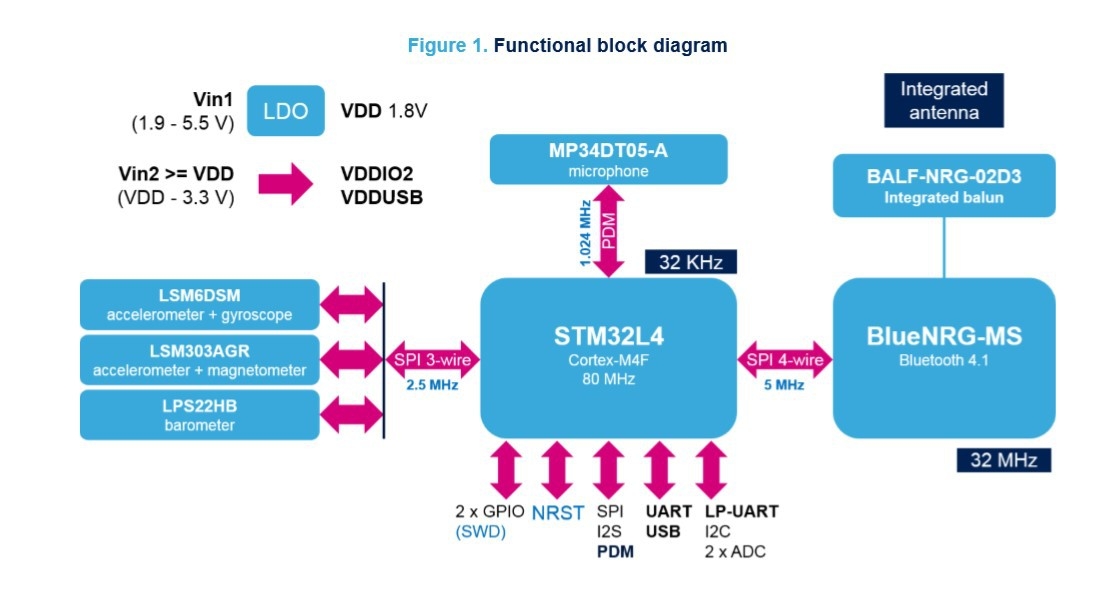
Picture 13 : Block Diagram
4.1 การออกแบบระบบ Monitoring แต่ละประเภท
1. ความถี่ (Frequency) คือ ความสัมพันธ์ระหว่างจำนวนรอบของการเคลื่อนที่หรือรอบของการหมุนต่อหน่วยเวลา รอบต่อวินาที จากตัวอย่างข้างต้นถ้าหากเพลาหมุนด้วยความเร็ว 1,200 รอบต่อนาที (rpm) ความถี่ในการหมุนก็จะเท่ากับ 1,200/60 = 20 รอบต่อวินาทีหรือ 20 Hz
2. การวัดระยะทางของการสั่นสะเทือน (Displacement) คือ การวัดระยะทางการเคลื่อนที่ของวัตถุที่มีการสั่นสะเทือนว่า “มีการเคลื่อนที่ไปจากจุดอ้างอิงเท่าใดในการสั่นสะเทือนแต่ละรอบ”โดยปกติจะ นิยมวัดเป็นมิลลิเมตร (mm) หรือ นิ้วในการวัดระยะทาง หรือวัดแบบเต็มคลื่น (Peak to Peak) ส่วนมากจะใช้กับการเคลื่อนที่ ที่มีความเร็วรอบต่ำๆ ไม่เกิน 1,200rpm ความถี่ออยู่ในช่วง 10Hz – 150Hz เช่น การสั่นสะเทือนของท่อ การวัดแรงสั่นสะเทือนบนพื้น
3. การวัดความเร็ว (Velocity) เป็น การวัดความเร็วในการเคลื่อนที่ของวัตถุที่สั่นสะเทือนว่า “มีความเร็วเท่าไหร่ในแต่ละรอบของการสั่นสะเทือน ”โดยปกตินิยมวัดเป็นมิลลิเมตร/วินาที (mm/s) และนิ้ว/วินาที (inch/sec) ในการวัดความเร็วเรามักจะวัดแบบ RMS เราจะใช้หน่วยนี้กับการ วัดการสั่นสะเทือน ที่มีความถี่ระหว่าง 10Hz -1,000Hz หรือความเร็วรอบในการหมุนที่สูงกว่า1,200rpm เช่น การเยื้องศูนย์ (Misalignment) ความไม่สมดุล (Unbalance)
4. การวัดอัตราเร่ง (Acceleration) เป็น การวัด“การเปลี่ยนแปลงอัตราส่วนของความเร็วในการเคลื่อนที่ต่อหน่วยเวลาของ วัตถุที่มีเป็นการวัด“การเปลี่ยนแปลงอัตราส่วนของความเร็วในการเคลื่อนที่ ต่อหน่วยเวลาของวัตถุที่มีการสั่นสะเทือน”ใช้ในการใช้ในการวัด การสั่นสะเทือน ที่ความถี่สูงคือ ตั้งแต่ 1,000 Hz ขึ้นไปเพราะว่าการสั่นสะเทือนที่ความถี่สูงนั้นระยะทาง การเคลื่อนที่จะน้อยและ ในขณะเดียวกันความเร็วในการเคลื่อนที่จะสูงมาก เช่น การวัดความสั่นสะเทือนของ Bearing
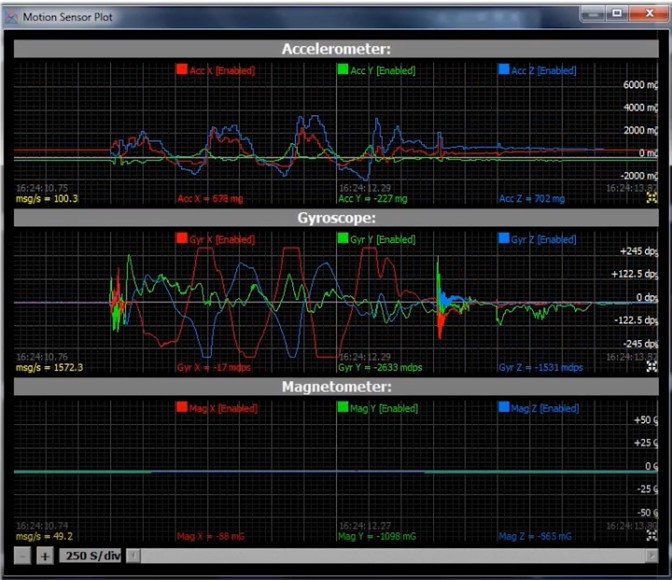
Picture 14 : คุณลักษณะของสัญญานที่ได้จากการตรวจจับการสั่นสะเทือนผ่าน SDK
4.1.1 การวิเคราะห์การสั่นสะเทือนจะอ้างอิงมาตรฐาน ISO10816-1-General-Machines ในการเปรียบเทียบกับค่ามาตรฐานสาหรับมาตรฐานสากลที่นิยมใช้อ้างอิงคือมาตรฐาน ISO 10816-3 ดังรูปที่ 2.11 อธิบายความหมายค่าการสั่นสะเทือนโดยรวม ได้ดังนี้ (ชัยอาจ, 2555)
Zone A คือ เครื่องจักรใหม่เริ่มติดตั้งเพื่อใช้งาน หากเครื่องจักรมีค่าการสั่นสะเทือนอยู่โซนนี้แสดงว่าเครื่องจักรทา งานปกติ
Zone B คือ เครื่องจักรมีการสั่นสะเทือนอยู่ในโซนนี้เป็นเครื่องจักรที่สามารถยอมรับได้และสามารถทา งานได้ในระยะยาว (Long Term)
Zone C คือ เครื่องจักรมีการสั่นสะเทือนอยู่ในโซนนี้นั้น เป็นเครื่องจักรที่การสั่นสะเทือนรุนแรงไม่ยอมรับและจะมีผลเสียกับเครื่องจักรในระยะยาว ดังนั้นเครื่องจักรควรจะต้องทา งานสลับกับเครื่องจักรตัวอื่น หรือ ควรจะทา การตรวจสอบอย่างใกล้ชิด จนกว่าจะมีการแก้ไข
Zone D คือ เครื่องจักรที่มีการสั่นสะเทือนอยู่ในโซนนี้นั้น เป็นเครื่องจักรที่มีระดับความรุนแรงที่นา ไปสู่ความเสียหายของเครื่องจักรได้
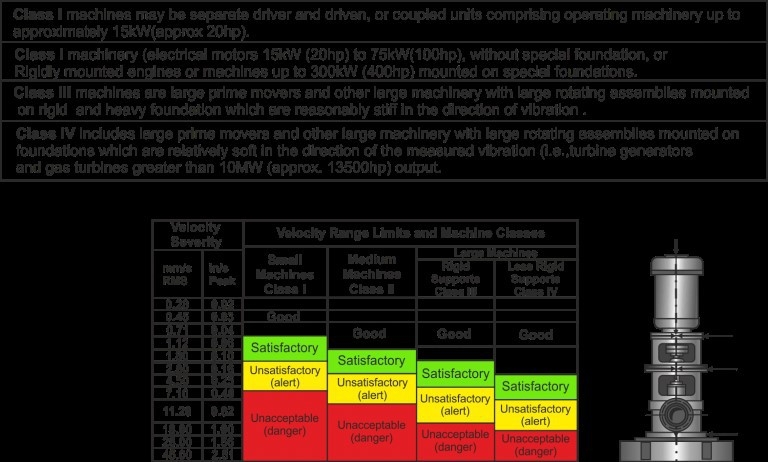
Picture 15 : มาตรฐาน ISO10816-1-General-Machines
4.2 การวิเคราะห์สนามแม่เหล็ก (Magnetic field Analysis)
ในเครื่องกลไฟฟ้า (เครืองกำเนิดไฟฟ้าและมอเตอร์ไฟฟ้า) และหม้อแปลงไฟฟ้ามีทังวงจรไฟฟ้าและ วงจรแม่เหล็ก โดยอาศัยขดลวดซึงพันรอบแกนเหล็กเส้นแรงแม่เหล็กทีเกิดขึ้นจะไหลผ่านวงจรแม่เหล็ก ปฏิกิริยาระหว่างกระแสและเส้นแรงแม่เหล็ก ก่อให้เกิดกระบวนการเปลียนรูปของพลังงาน เช่น ในเครือง กำเนิดไฟฟ้าทำหน้าทีเปลียนรูปพลังงานกลเป็นพลังงานไฟฟ้า ในมอเตอร์ไฟฟ้าทำหน้าทีเปลียนรูปพลังงาน ไฟฟ้าเป็นพลังงานกล (เงาเดช, ม.ป.ป.)
การสั่นสะเทือน คือปรากฏการณ์ของการเคลื่อนทีกลับไปกลับมาของวัตถุจากอิทธิพลของแรงกระทำ ซึ่งอาจเป็นแรงกระทำจากภายในที่ก่อให้เกิดการสั่นสะเทือนแบบอิสระ (free vibration) ความถี่ธรรมชาติ ซึงอาจจะมีความถี่เดียวหรือหลายความถี่ได้ ทั้งนี้ขึ้นอยู่กับธรรมชาติ ของระบบ หรือเป็นแรงกระทําจากภายนอกทีก่อให้เกิดการสันสะเทือนแบบบังคับ (forced vibration) โดยความถี่เท่ากับความถี่ของแรงภายนอกทีมากระทำ และถ้าความถี่ของแรงทีมา กระทาเท่ากับความถีธรรมชาติจะทำให้เกิดปรากฏการณ์เรโซแนนซ์ (resonance) นันคือขนาดของ การสั่นสะเทือนจะถูกขยายขึ้นจนทำให้เกิดความเสียหายแก่ระบบได้
การสั่นสะเทือนทางกลของมอเตอร์กระแสตรงไร้แปรงถ่านหรือสปินเดิลมอเตอร์จะมีการกระจายตัวของ สนามแม่เหล็กตลอดพืนทีหน้าตัดของมอเตอร์ ซึงค่าสนามแม่เหล็กนี้จะทำ ให้เกิดแรงแม่เหล็กไฟฟ้าทีกระจายอยู่บนพื้นที่หน้าตัดของมอเตอร์เป็นตัวการทีทำให้เกิดการสั่นสะเทือน ซึงสาเหตุต่าง ๆ เหล่านี้ย่อมส่งผลกระทบต่อการกระจายตัวที่ไม่สมดุลของสนามแม่เหล็กในมอเตอร์ แล้วส่งผลให้เกิดการสั่นสะเทือนขึ้น ทำให้มีการสูญเสียทางกล สมรรถนะในการทำงานและอายุการใช้งานของมอเตอร์ลดลง (การวิเคราะห์สนามแม่เหล็กและการสั่นสะเทือนทางกลของมอเตอร์กระแสตรง ไร้แปรงถ่านในฮาร์ดดิสก์ด้วยวิธีไฟไนท์อิลิเมนท์, 2556)

Picture 16 : คุณลักษณะของสัญญานที่ได้จากการตรวจจับสนามแม่เหล็กผ่าน SDK
4.3 การวิเคราะห์อุนหภูมิ (Temperature Analysis)
การแผ่รังสีความร้อนของวัตถุสามารถประยุกต์ใช้ในงานตรวจสอบเครื่องจักรได้อย่างกว้างขวาง สำหรับการตรวจสอบอุปกรณ์ทางกลเราต้องมีความรู้เรื่องต่าง ๆ เช่น การทำงานพื้นฐานของเครื่องจักรนั้น ๆ การถ่ายเทภาพความร้อนของเครื่องจักร กลไกของการชำรุดเสียหายทางกลที่เกี่ยวกับความร้อน ส่วนข้อมูลทางความร้อนที่ได้จะเป็นสิ่งที่ช่วยพิจารณาการทำงานของเครื่องจักรนั้นเป็นไปตามปัญหาทั่วไปที่เราจะพบในเครื่องจักรจะมีความสัมพันธ์กับปัจจัยต่าง ๆ ดังนี้ (วงศ์ฝั้น, 2562)
- ความเสียดทานที่สูงเกินไป (Excessive friction) เช่น ในแบริ่งและเกียร์
- การถ่ายเทความร้อนที่ไม่สม่ำเสมอ (casting operation) ในกรณีงานหล่อขึ้นรูปชิ้นงาน
- การกระจายตัวของอุณหภูมิไม่สม่ำเสมอ (non uniform temperature distribution) เช่นภายในตู้อบ
- การระบายความร้อนไม่ดีพอ (inadequate cooling or heating) เช่นในตัวระบายความร้อน
- การไหลของของเหลวไม่ดี (inadequate liquid flow) เช่นการอุดตันภายในท่อ
- ความแตกต่างของความจุความร้อน (difference in capacitance) ใช้ในการวัดระดับของเหลว
- ความแตกต่างของการนำความร้อน (conductive heat flow) เช่นกรณีของวัสดุทนไฟหลุดร่อน
- การรั่วของอากาศ (air leakage) เช่นกรณีของคอนเดนเซอร์ตัวอย่างการตรวจสอบเครื่องจักรด้วยกล้องถ่ายภาพความร้อน
Picture 17 : คุณลักษณะของสัญญานที่ได้จากการตรวจจับอุณหภูมิผ่าน SDK
4.4 การออกแบบ UI&UX เพื่อนำมาใช้ Monitoring และเชื่อต่อกับ API
Project Condition base Monitoring (CBM) นั้นถือว่าเป็น Module/Package เพิ่มเติมจากที่เคยพัฒนา Production Monitoring (OEE) โดย Project CBM วาง Featureไว้ดังนี้
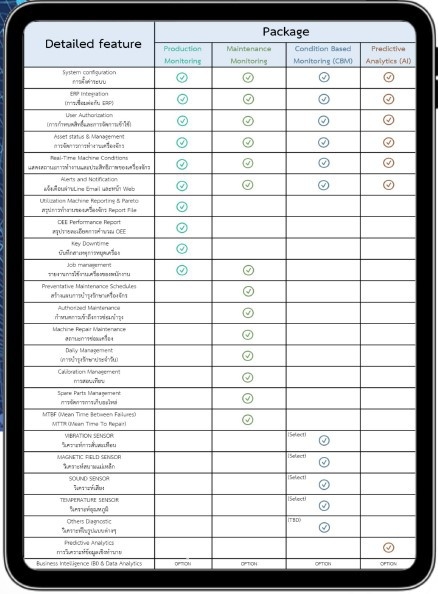
Picture 18: Package MMS
-
ystem configuration (การตั้งค่าระบบ)
-
ERP Integration (การเชื่อมต่อกับ ERP)
-
User Authorization (การกำหนดสิทธิ์และการจัดการเข้าใช้)
-
Asset status & Management (การจัดการการทำงานเครื่องจักร)
-
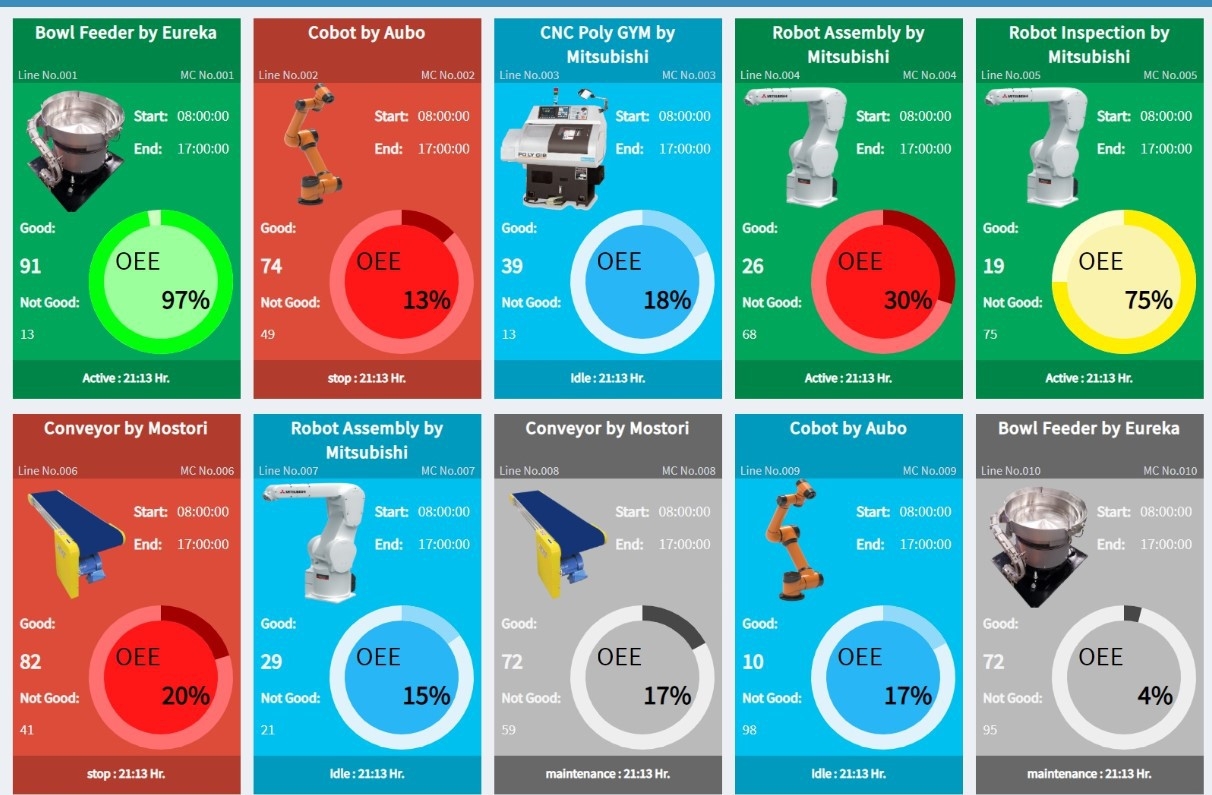
Real-Time Machine Conditions (แสดงสถานะการทำงานและประสิทธิภาพของเครื่องจักร)
-
Alerts and Notification (แจ้งเตือนผ่านLine Email และหน้า Web)
-
การวิเคราะห์การสั่นสะเทือน (Vibration Analysis)
-
การวิเคราะห์สนามแม่เหล็ก (Magnetic field Analysis)
-
การวิเคราะห์อุนหภูมิ (Temperature Analysis)
-
การวิเคราะห์ในรูปแบบอื่นๆ (Other Analysis)
ดังนั้นไม่ว่าจะเป็นตัวโปรแกรมเว็บแอปพลิเคชั่น (web application) เว็บเซิร์ฟเวอร์ (web server) เว็บเซิร์ฟเวอร์ซอฟต์แวร์ (web server software) ฐานข้อมูล (database) เว็บเบราว์เซอร์ (web browser) การเรียก Service Rest API (Representational State Transfer Application Programming Interface)จะใช้งานร่วมกันเพื่อให้ Client-side and Server-side Technology สามารถแสดงข้อมูลแบบเชื่อมโยงให้เกิดประสิทธิภาพสูงสุด
4.5 การออกแบบหน้า Dashboard ที่เกี่ยวข้องมีทั้งหมด 7 หน้า
1) System configuration (การตั้งค่าระบบ) หน้านี้ออกแบบเพื่อการตั้งค่าระบบในรูปแบบต่างๆ
2) ERP Integration (การเชื่อมต่อกับ ERP) หน้านี้ออกแบบเพื่อการทำงานร่วมกับระบบ ERP
3) User Authorization (การกำหนดสิทธิ์และการจัดการเข้าใช้) หน้านี้ออกแบบเพื่อกำหนดสิทธิ์การใช้งาน
4) Asset status & Management (การจัดการการทำงานเครื่องจักร) หน้านี้ออกแบบเพื่อรวบรวมเครื่องจักร หรือ Equipment ที่ต้องการตรวจติดตาม
5) Real-Time Machine Conditions (แสดงสถานะการทำงานและประสิทธิภาพของเครื่องจักร) หน้านี้ออกแบบเพื่อแสดงสถานะของเครื่องจักร
6) Alerts and Notification (แจ้งเตือนผ่านLine Email และหน้า Web) หน้านี้ออกแบบเพื่อกำหนดเงื่อนไขการแจ้งเตือนในรูปแบบต่างๆ
7) Machine Base Condition (CBM) (แสดงสถานะการทำงานแบบบำรุงรักษาเชิงคาดการณ์) หน้านี้ออกแบบเพื่อการวิเคราะห์การสั่นสะเทือน (Vibration Analysis) การวิเคราะห์สนามแม่เหล็ก (Magnetic field Analysis) การวิเคราะห์อุนหภูมิ (Temperature Analysis)
-
ที่มา ; (TGI), ส.-อ. (2562). ระบบ Smart Maintenance ในยุค Industry 4.0.
-
Advanced Research Group Co., L. (2019, October). Web Application (เว็บแอปพลิเคชั่น) คืออะไร
- arjchariyaphat, k. (2018, February 18). LoRA, LoRaWAN คืออะไร มารู้จักกันดีกว่า codequs. (2018, September 15 ). 24 JavaScript Libraries for Creating Beautiful Charts.
- Rastegari, A. (2017). Condition Based Maintenance in the Manufacturing Industry: From Strategy.
- STMicroelectronics. (2019). Getting started with the STEVAL-STLKT01V1 SensorTile integrated development platform UM2101. STMicroelectronics.
- เงาเดช, ม. (n.d.). แม่เหล็กไฟฟ้าและวงจรแม่เหล็ก.
- โสภิตพันธ์, ด. (2562, กันยายน 25). การบำรุงรักษาอย่างชาญฉลาด : Smart Maintenance.
- การวิเคราะห์สนามแม่เหล็กและการสั่นสะเทือนทางกลของมอเตอร์กระแสตรง ไร้แปรงถ่านในฮาร์ดดิสก์ด้วยวิธีไฟไนท์อิลิเมนท์, SUT7-711-55-12-08 (มหาวิทยาลัยเทคโนโลยีสุรนารี พฤษภาคม 2556).
- ชัยอาจ, ช. (2555). การพัฒนาการบำรุงรักษาแบบติดตามสภาพสำหรับเครื่องสูบน้ำหินปูน ระบบกำจัดก๊าซซัลเฟอร์ไดออกไซด์ที่โรงไฟฟ้าแม่เมาะ. Retrieved from วิทยนิพนธ์ (วิศวกรรมศาสตรมหาบัณฑิต (สาขาวิชาวิศวกรรมอุตสาหการ - มหาวิทยาลัยเชียงใหม่)
- ยุวภูษิตานนท์, ร. ด. (2020, มกราคม). การพยากรณ์สถานะของเครื่องจักรและอุปกรณ์ในการบำรุงรักษาเชิงคาดการณ์ (Prognostics and Health Management in Condition-based Maintenance)
- วงศ์ฝั้น, น. (2562, กุมภาพันธ์ 19). การบำรุงรักษาเครื่องจักรด้วยภาพถ่ายความร้อน

